首页 >> 人工智能 >
在现实世界中安全地学习运动技能
深度强化学习 (RL) 的最新进展能够解决机器人技术中复杂的高维问题。然而,有效地训练 RL 策略需要探索可能对机器人不安全的机器人状态和动作。因此,Google Research 最近的一篇论文介绍了一种 RL 框架,用于学习腿部运动,同时满足训练期间的安全约束。
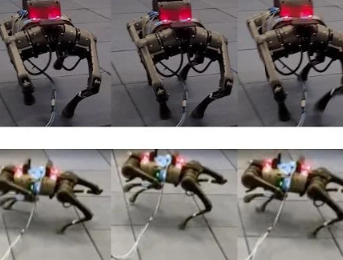
该框架由两个政策组成。“安全恢复策略”将机器人从接近不安全的状态中恢复,“学习者策略”执行所需的控制任务。该算法的有效性在三个运动任务上得到证明。对于高效的步态和走秀任务,实现了没有跌倒且无需手动重置的策略。
只用四次跌倒训练了一条两条腿的平衡任务。该论文表明,在现实世界中自主安全地学习腿部运动技能是可能的。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
安徽淮南长安猎手K50作为一款备受关注的皮卡车型,其2025款在配置和性能上都有所升级。对于想要购买这款车的消...浏览全文>>
-
安徽阜阳的大众高尔夫GTI作为一款备受年轻消费者喜爱的性能车型,其价格和配置一直是大家关注的重点。高尔夫GT...浏览全文>>
-
近年来,新能源汽车市场发展迅猛,大众品牌凭借其深厚的技术积累和可靠的产品品质,在国内市场上占据了重要地...浏览全文>>
-
QQ多米作为一款备受关注的小型车,凭借其时尚的外观设计和实用的配置,吸引了众多消费者的关注。为了帮助大家...浏览全文>>
-
随着新能源汽车市场的持续升温,上汽大众ID 6 X凭借其宽敞的7座空间和出色的续航能力,成为不少家庭用户的关...浏览全文>>
-
淮南途锐新能源2024款车型以其卓越的性能和环保特性吸引了众多消费者的关注。作为一款高端插电式混合动力SUV,...浏览全文>>
-
近年来,随着新能源汽车的普及和政策支持的不断加大,越来越多消费者将目光投向了插电混动车型。作为一款备受...浏览全文>>
-
2025款生活家PHEV作为一款备受关注的新能源车型,凭借其出色的性能和环保特性,吸引了众多消费者的目光。在购...浏览全文>>
-
长安汽车旗下高端新能源品牌——启源,在2024款新车的推出中再次吸引了广泛关注。作为该品牌的旗舰车型之一,...浏览全文>>
-
近年来,新能源汽车市场持续火热,各大品牌纷纷推出新款车型以满足消费者需求。在众多选择中,2025款安徽池州I...浏览全文>>
大家爱看
- iPhone用户现在可以通过iOS18.1更新更改其Apple帐户的主要电子邮件地址
- 当你看到T-Mobile用户赢得手机手表和耳机时你会羡慕不已
- Ubuntu24.10OracularOriole推出最新内核工具链GNOME47和增强的安全性
- 搭载M4的MacBookPro在Cinebench上击败了CoreUltra9288V和Ryzen9AI370HX
- EarFun推出功能强大的159美元UBoomX便携式扬声器
- iPhone16Pro iPhone16ProMax表现优于基本机型扭转了之前的趋势
- Waze迎来魔兽世界改版
- SquareEnix将心爱的RPG移植到MetaQuest3
- 苹果正在设计全新操作系统瞄准新类别的产品
- 小米RedmiA27U显示器采用4K面板和90WUSBC端口
频道推荐
站长推荐
- 苹果将为iPhone17系列采用新电池技术
- Adobe推出PhotoshopElements和PremiereElements2025取消Elements软件的永久许可
- AppleiPhoneSE4将配备更新的OLED显示屏
- InfinixZeroFlip首次亮相作为新款可折叠Android智能手机其价格低于摩托罗拉Razr2024
- OnePlus13型号 充电规格在最新泄漏中被登记
- Insta360AcePro2主要规格终于泄露GoPro和DJI运动相机竞争对手将配备50MP传感器5nm和2倍数码变焦
- XboxElite无线控制器系列2通过Xbox设计实验室获得透明面板
- 索尼INZONEM10S华硕ROGSwiftOLEDPG27AQDP新品上市但售价更高
- 谷歌终止PixelBuds的点击通知功能
- 谷歌正在努力完善iOS中缺少的RCS支持重要功能
- 对AppleIntelligence功能的评价从一般到还可以
- GalaxyS25Plus看起来很时髦但三星是否选择像iPhone一样的通用设计
- 优质48英寸三星S90DOLED电视在亚马逊上降至历史最低价同时赠送100美元Xbox礼品卡和1年保护计划
- AOC推出四款新型游戏显示器具有快速刷新率和低价格
- Valve出售部分SteamDeck型号-GBLCD型号售价296.65美元512GBLCD型号售价336.75美元
- Beats在其产品线中增加了手机保护壳推出适用于iPhone16系列的MagSafe保护壳
- 三星在IFA2024上展示AI产品
- 新的AIPlaygroundDesign工具你可以简单地与之交谈就像ChatGPT一样
- 极简主义Linux发行版Peropesis2.7附带存档和ISO管理工具
- GAMEBABY控制器和外壳混合套装现已接受预订