首页 >> 人工智能 >
水下机器人在海洋测绘方面得到提升
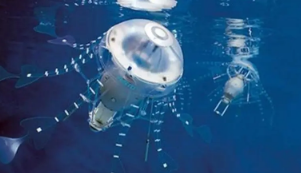
许多水下区域尚未绘制地图。自主水下机器人舰队将对这项任务有很大帮助。IEEEJournalofOceanicEngineering最近的一项研究提出了一种新的框架,该框架允许自主水下机器人以高效率和低错误率绘制杂乱区域的地图。
由于GPS在水下不可用,机器人必须依赖其他技术。研究人员建议使用虚拟地图,抽象地表示机器人尚未看到的周围区域。
提出了一种在该虚拟地图上规划路线的算法。它考虑了机器人的定位不确定性和感知观察。声纳成像用于检测机器人前方30米范围和120度视野范围内的物体。
使用BlueROV2水下机器人的评估表明,该方法在快速探索未知环境和构建准确地图之间提供了一种折衷方案。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
安徽淮南长安猎手K50作为一款备受关注的皮卡车型,其2025款在配置和性能上都有所升级。对于想要购买这款车的消...浏览全文>>
-
安徽阜阳的大众高尔夫GTI作为一款备受年轻消费者喜爱的性能车型,其价格和配置一直是大家关注的重点。高尔夫GT...浏览全文>>
-
近年来,新能源汽车市场发展迅猛,大众品牌凭借其深厚的技术积累和可靠的产品品质,在国内市场上占据了重要地...浏览全文>>
-
QQ多米作为一款备受关注的小型车,凭借其时尚的外观设计和实用的配置,吸引了众多消费者的关注。为了帮助大家...浏览全文>>
-
随着新能源汽车市场的持续升温,上汽大众ID 6 X凭借其宽敞的7座空间和出色的续航能力,成为不少家庭用户的关...浏览全文>>
-
淮南途锐新能源2024款车型以其卓越的性能和环保特性吸引了众多消费者的关注。作为一款高端插电式混合动力SUV,...浏览全文>>
-
近年来,随着新能源汽车的普及和政策支持的不断加大,越来越多消费者将目光投向了插电混动车型。作为一款备受...浏览全文>>
-
2025款生活家PHEV作为一款备受关注的新能源车型,凭借其出色的性能和环保特性,吸引了众多消费者的目光。在购...浏览全文>>
-
长安汽车旗下高端新能源品牌——启源,在2024款新车的推出中再次吸引了广泛关注。作为该品牌的旗舰车型之一,...浏览全文>>
-
近年来,新能源汽车市场持续火热,各大品牌纷纷推出新款车型以满足消费者需求。在众多选择中,2025款安徽池州I...浏览全文>>
大家爱看
- iPhone用户现在可以通过iOS18.1更新更改其Apple帐户的主要电子邮件地址
- 当你看到T-Mobile用户赢得手机手表和耳机时你会羡慕不已
- Ubuntu24.10OracularOriole推出最新内核工具链GNOME47和增强的安全性
- 搭载M4的MacBookPro在Cinebench上击败了CoreUltra9288V和Ryzen9AI370HX
- EarFun推出功能强大的159美元UBoomX便携式扬声器
- iPhone16Pro iPhone16ProMax表现优于基本机型扭转了之前的趋势
- Waze迎来魔兽世界改版
- SquareEnix将心爱的RPG移植到MetaQuest3
- 苹果正在设计全新操作系统瞄准新类别的产品
- 小米RedmiA27U显示器采用4K面板和90WUSBC端口
频道推荐
站长推荐
- 苹果将为iPhone17系列采用新电池技术
- Adobe推出PhotoshopElements和PremiereElements2025取消Elements软件的永久许可
- AppleiPhoneSE4将配备更新的OLED显示屏
- InfinixZeroFlip首次亮相作为新款可折叠Android智能手机其价格低于摩托罗拉Razr2024
- OnePlus13型号 充电规格在最新泄漏中被登记
- Insta360AcePro2主要规格终于泄露GoPro和DJI运动相机竞争对手将配备50MP传感器5nm和2倍数码变焦
- XboxElite无线控制器系列2通过Xbox设计实验室获得透明面板
- 索尼INZONEM10S华硕ROGSwiftOLEDPG27AQDP新品上市但售价更高
- 谷歌终止PixelBuds的点击通知功能
- 谷歌正在努力完善iOS中缺少的RCS支持重要功能
- 对AppleIntelligence功能的评价从一般到还可以
- GalaxyS25Plus看起来很时髦但三星是否选择像iPhone一样的通用设计
- 优质48英寸三星S90DOLED电视在亚马逊上降至历史最低价同时赠送100美元Xbox礼品卡和1年保护计划
- AOC推出四款新型游戏显示器具有快速刷新率和低价格
- Valve出售部分SteamDeck型号-GBLCD型号售价296.65美元512GBLCD型号售价336.75美元
- Beats在其产品线中增加了手机保护壳推出适用于iPhone16系列的MagSafe保护壳
- 三星在IFA2024上展示AI产品
- 新的AIPlaygroundDesign工具你可以简单地与之交谈就像ChatGPT一样
- 极简主义Linux发行版Peropesis2.7附带存档和ISO管理工具
- GAMEBABY控制器和外壳混合套装现已接受预订